Así es el robot que cambia su propia forma según la tarea que ejecute
Investigadores estadounidenses desarrollan el primer prototipo capaz de reorganizar su arquitectura sin control humano en entornos desconocidos

Las innovaciones en el mundo de la robótica se suceden de manera frenética. Tres de los retos que más fascinan en la actualidad a la comunidad científica son conseguir que las máquinas actúen cada vez más autónomamente, ejerzan múltiples tareas y se adapten a ambientes diferentes. Un grupo de investigadores estadounidenses ha desarrollado por primera vez un prototipo de robot capaz de las tres cosas al mismo tiempo. Este modelo puede cumplir acciones en un entorno desconocido, por ejemplo, identificar un objeto, recogerlo y llevarlo a una zona designada o subir unas escaleras para depositar un sobre en una caja, tras configurar su arquitectura según el objetivo que se le ha pedido y los obstáculos que se encuentra. Así lo demuestran tres experimentos descritos en un estudio publicado este miércoles en Science Robotics.
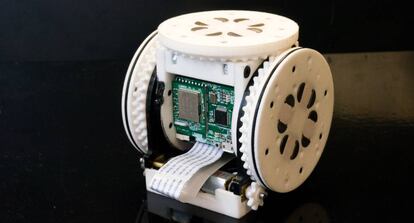
“Puede haber robots capaces de subir muy bien unas escaleras, pero que no sabrían pasar por una hendidura”, pone como ejemplo en teleconferencia desde EE UU uno de los autores, Jonathan Daudelin de la Cornell University (estado de Nueva York). Para superar este problema, desde hace unos 25 años, distintos grupos de investigación exploran cómo usar unos robots definidos modulares, agrega Mark Yim, coautor y docente en la Universidad de Pennsylvania. “Estas máquinas son sistemas formados por elementos robóticos repetidos (módulos) que son en sí robots, pero pueden conectarse uno con otro para crear estructuras diferentes con funcionalidades distintas”, explica Tarik Tosun, otro coautor y exalumno de Yim. Esta característica los hace “muy versátiles y flexibles”, agrega.

Daudelin asegura que, gracias a esa capacidad, los robots modulares “tienen el potencial de adaptarse a lo que perciben en su entorno”. El investigador añade que eso “funciona muy bien para sistemas autónomos en ambientes desconocidos”, añade. Estas consideraciones han llevado a él y a sus compañeros a diseñar un sistema central inteligente que integra algoritmos y sensores capaces de gobernar la acción de unos módulos robóticos cúbicos y modificarla según cambie la percepción de lo que lo rodea, explica Daudelin. El resultado es el primer prototipo que puede reconfigurar su forma, por ejemplo, pasar de vehículo de exploración a máquina recolectora de objetos, y adaptarse a distintas tareas sin control humano.
Tres pruebas
En el artículo publicado este miércoles, los autores describen tres pruebas. En la primera, el robot tenía asignada la tarea de encontrar dos pequeños objetos, uno de color rosa y uno verde, colocados en una habitación entre distintos obstáculos. El objetivo final era recogerlos y llevarlos a una zona marcada en azul, ubicada en otro punto del cuarto. En el segundo, tenía que depositar otro objeto en una caja colocada encima de unas escaleras. El tercer experimento preveía que el robot colocara una pegatina en un punto de una caja marcado en rosa.
Para conseguir estos objetivos, la máquina debía explorar el entorno con sus cámaras y sensores, diseñar un mapa 3D de ese ambiente y decidir cómo configurar los módulos, cada uno dotado de elementos como ruedas e imanes, de la forma más eficaz para solucionar la misión designada. Los módulos pueden desconectarse del eje central del robot y moverse libremente según le indique el sistema inteligente instalado en él a través de una conexión wi-fi. La acción de reconfiguración de un módulo tardó en completarse alrededor de un minuto, aseguran los autores de los experimentos. En anteriores pruebas realizadas en otros estudios, podía tardar entre cinco y 15 minutos, contrastan.
“El algoritmo se basa en una “biblioteca” de comportamientos y posibles conformaciones del robot”, explica Daudelin. “Cada registro representa una acción, como moverse o agarrar un objeto, correspondiente con la forma requerida y las condiciones del entorno necesarias para ejecutar esa acción”, detalla.
Una misión difícil
Lograr que los robots modulares sean autónomos es un objetivo de gran complejidad, aseguran los autores. “Una gran diferencia con respecto a robots de una sola forma es que hay múltiples elementos robóticos, en nuestro caso muchos, independientes uno del otro”, explica Daudelin. “Por eso hay muchas más posibilidades de error. Si un elemento falla, puede que se descoloque todo el sistema”, asegura. Tosun recuerda que el algoritmo que regula la máquina tiene que elegir “no solo qué va a hacer, sino también qué forma va a asumir para completar su tarea”.
El ingeniero cuenta que, durante las pruebas, notaron muchas situaciones en las que el robot “no hacía exactamente lo que estaba previsto” y que algunas acciones necesitaban en su planificación “mucha más fortaleza ante la posibilidad de fallar” que otras, porque se ponían en práctica con más frecuencia. Por todas esas razones, Daudelin cree que aún faltan años de investigación antes de que un robot con esas características sea disponible en el mercado. “Se necesitan muchas mejoras en la tecnología para aumentar la solidez y las habilidades de reconfiguración de los robots modulares”, considera.
Pese a las dificultades, los creadores del nuevo prototipo aseguran que los robots modulares autónomos podrían ser útiles en sectores como las operaciones de búsqueda y rescate o en acciones militares. “En estas aplicaciones, el robot podría encontrarse una variedad de terrenos distintos y otros entornos desconocidos que requieren la transformación de su forma para adaptarse”, afirma Dudelain. En misiones militares, agrega, se puede sumar el inconveniente de que los explosivos dañen partes de una máquina. “Un robot modular puede tener una ventaja, porque solo se necesitaría cambiar los módulos dañados y no la estructura entera”, explica. Su compañero Tarik Tosun asegura que también podrían ayudar en tareas domésticas diarias.
Próximas generaciones
Jamie Paik, directora del Reconfigurable Robotics Lab de Lausana (Suiza), considera el trabajo de estos investigadores "impactante y novedoso", porque "enseña realmente ejemplos de cómo puede haber estructuras modulares que reaccionan y se adaptan a un nuevo entorno y a nuevas tareas de manera autónoma". Para esta investigadora, los tres planes en los que se basa el modelo que han desarrollado (los módulos autónomos, el centro de control inteligente y el almacén de acciones preprogramadas) permiten al sistema concentrarse "no tanto en cada detalle individual del comportamiento de cada módulo, sino más bien en saber reaccionar a la situación".
Este ejemplo ofrece así a la comunidad científica una base para explorar “cómo reconfigurar un formato robótico según cómo cambie el entorno”, asegura Paik. La ingeniera cree que será más fácil realizar aplicaciones concretas en una casa que en el exterior, porque es más sencillo explorar la conformación y la distribución de objetos. “En ambientes exteriores hacen faltas más sensores, que te permitan hacer más cosas”, afirma.
Entender dónde está la línea entre tareas realizables y tareas irrealizables es una de las preguntas que se ponen los investigadores en esta área. Hada Kress-Gazit, profesora de la Cornell University y también coautora del estudio publicado este miércoles en Science Robotic, ofrece una sugerencia: "Esta cuestión puede inspirar el diseño de las próximas generaciones de módulos robóticos, o ideas sobre cómo hacer colaborar dos robots modulares para hacer algo diferente".
Tu suscripción se está usando en otro dispositivo
¿Quieres añadir otro usuario a tu suscripción?
Si continúas leyendo en este dispositivo, no se podrá leer en el otro.
FlechaTu suscripción se está usando en otro dispositivo y solo puedes acceder a EL PAÍS desde un dispositivo a la vez.
Si quieres compartir tu cuenta, cambia tu suscripción a la modalidad Premium, así podrás añadir otro usuario. Cada uno accederá con su propia cuenta de email, lo que os permitirá personalizar vuestra experiencia en EL PAÍS.
¿Tienes una suscripción de empresa? Accede aquí para contratar más cuentas.
En el caso de no saber quién está usando tu cuenta, te recomendamos cambiar tu contraseña aquí.
Si decides continuar compartiendo tu cuenta, este mensaje se mostrará en tu dispositivo y en el de la otra persona que está usando tu cuenta de forma indefinida, afectando a tu experiencia de lectura. Puedes consultar aquí los términos y condiciones de la suscripción digital.