Tres nuevos robots andan con igual eficiencia que los humanos
Parecen un manojo de barras metálicas, con cables, algunos muelles y grandes pies de plata, pero son robots muy avanzados, robots bípedos que imitan muy bien el caminar humano y, lo que es más novedoso e importante: son tan eficientes energéticamente como una persona que pasee. Dos artilugios de este tipo, ejemplares de la ingeniería robótica de vanguardia, debutaron ayer en la reunión anual de la Asociación Americana para el Avance de la Ciencia (AAAS), y sus detalles técnicos se presentan, junto a los de otro robot holandés, hoy en la revista Science, que edita dicha organización. Estos nuevos androides tienen muchos menos cerebro que los productos de la robótica tradicional, destacaron los investigadores.
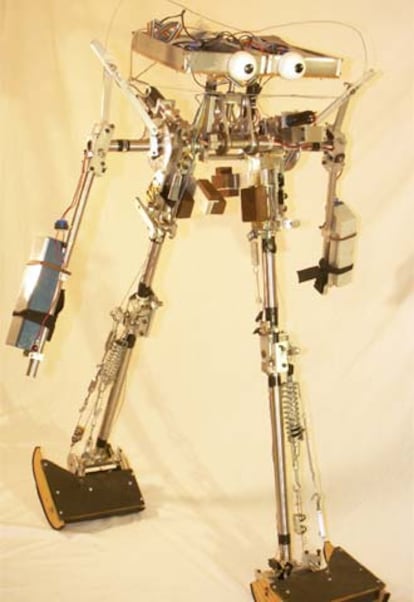
El bípedo de la Universidad de Cornell mide un metro, tiene dos patas largas con articulaciones -caderas, rodillas y tobillos- dos brazos, una barra corta en lugar de torso y una caja plana por cabeza, donde va un pequeño microcontrolador. Los dos ojos protuberantes son dos cascarones de plástico: "Pura decoración", dice Andy Ruina, uno de los padres del engendro, cuyo interés reside en que imita mecánicamente muy bien el caminar humano, explotando eficazmente el equilibrio y la dinámica del balanceo natural, de manera que precisa muy poca energía para desplazarse.
Ruina, Collins y Russ Tedrake (del Instituto de Tecnología de Massachusetts), presentaron sus robots rodeados de juguetes andarines como pingüinos, elefantes o monigotes de madera que se desplazan sobre rampas. Los juguetes eran importantes para explicar su trabajo: los robots que caminan sin pilas han existido desde hace mucho tiempo, pero sólo lo hacen en una superficie descendente, aprovechando el efecto de la gravedad. Sin embargo, cuando se quiere que un robot ande en un plano horizontal hay que ponerle pilas o enchufarlo o darle cuerda.
Sólo para avanzar
Los robots convencionales que andan sobre dos patas tienen que tener actuadores o motores en cada articulación y por ello su consumo es alto, explicó Ruina. El caso de referencia es el bípedo japonés Asimo, un robot convencional en este sentido. El ejemplar de Cornell es 10 veces más eficiente en consumo de energía por unidad de peso y distancia recorrida. "El robot de Cornell utiliza la energía sólo para avanzar", dijo el investigador. "En otros robots los motores están luchando contra sí mismos". Ruina y Collins destacaron que su trabajo va a permitir conocer mejor la biomecánica de la locomoción humana, lo que debe tener aplicaciones médicas en rehabilitación y en el desarrollo de mejores prótesis.
El otro robot presentado ayer es el de Tedrake, más pequeño y compacto. Su habilidad es el aprendizaje. Ayer dio unos tímidos pasos, como un crío aprendiendo a andar. Lamentablemente, cuando Tedrake lo conectó -sin hilos- a su ordenador, el artilugio se negó a dar un paso: "Demasiadas interferencias en esta sala", se justificó el investigador del MIT.