El futuro robot conductor
La Universidad de Roma logra que un autómata maneje un coche en un simulador

No es precisamente un Fernando Alonso. Conduce a unos 30 kilómetros por hora. No le van nada bien las curvas fuertes. Necesita que le pongan el pie sobre el pedal y las manos al volante. Y con las vibraciones y traqueteos de un vehículo real aún no se atreve. Pero no se emborracha, se cansa o se distrae con el móvil. Es un robot conductor.
Es el proyecto presentado en el pasado Humanoids 2014 —el mayor congreso mundial de robótica humanoide, que se celebró en Madrid del 18 al 20 de noviembre— por cuatro investigadores de la Universidad de Roma Sapienza y de la Universidad de Montpellier. Un robot que es capaz de conducir un coche en un simulador. Un primer paso que según Antonio Paolillo (Salerno, 1985), uno de los científicos responsables de la investigación, aspira a mucho más: "Esto es un proyecto general. Los humanos robóticos, al tener nuestra apariencia, son una plataforma muy versátil que puede usarse para múltiples tareas. Lo que queremos demostrar es que ya son capaces de llevar tareas complejas".
Su autómata responde bien al desafío planteado gracias a una programación que funciona como nuestros sentidos. "Uno de los módulos controla la visión", explica Paolillo. "Graba con una cámara la carretera y reconoce y reacciona ante las diferentes situaciones que se le presentan". La otra clave para el triunfo es la interacción, el talón de Aquiles que continúa reforzando la robótica: "Se trata de conseguir una trayectoria segura. Es decir, que el robot no rompa las herramientas ni se rompa a sí mismo". En el caso de su humanoide, solo tiene que preocuparse de pedal y volante. De momento, lo de que entre y salga por su propio pie del coche no se contempla.
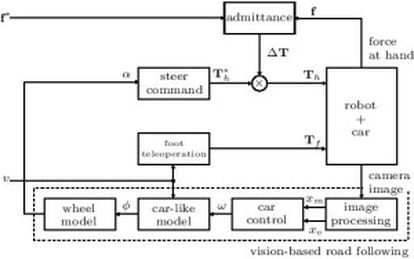
Las matemáticas juegan un papel esencial. En la investigación de este equipo vuelve a ser evidente cuánto cuesta traducir lo que para el hombre es natural (ver, tocar...) a un ente artificial. "No podemos enfrentarlo a una curva porque de momento solo conseguimos que conduzca por lo que él interpreta como una recta", admite Paolillo. El truco está en que si la curva es suave el robot puede interpolar con la visión; es decir, sumar pequeños segmentos rectos levemente desviados que le permiten ajustar su trayectoria y tomar la curva. Mantener el coche recto y no dar bandazos también es cuestión de papel, lápiz y ecuaciones. "Se trata de reducir dos variables a cero. X que sería la distancia al centro de la carretera. Y Θ que sería el ángulo del coche respecto a la vía. Si las dos son cero el robot conduce recto y por el medio".
Paolillo es muy consciente de las limitaciones que tiene por ahora su prototipo. De hecho, admite que "no hay fechas" para ponerlo dentro de un automóvil de verdad y ver como le va, pero que lo harán en el futuro. Eso sí, disiente de que pudiendo diseñar un cerebro informático que conduzca por nosotros, la robótica humanoide se presente como un gasto inútil para estas tareas: "Imagina un desastre como el de Fukushima. Un robot podría acceder a la zona del siniestro, efectuar reparaciones en condiciones imposibles para el ser humano y hasta rescatar a gente trayéndolas a salvo en su vehículo".